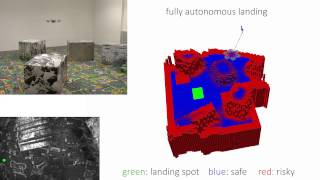
Media Summary: Monocular Depth Perception-based Autonomous Navigation for UAVs Lingyu Ma, Soon-Jo Chung, and Seth Hutchinson, " In this paper, we propose a resource-efficient system for real-time 3D terrain reconstruction and landingspot detection for micro ...
Monocular Vision Based Autonomous Navigation - Detailed Analysis & Overview
Monocular Depth Perception-based Autonomous Navigation for UAVs Lingyu Ma, Soon-Jo Chung, and Seth Hutchinson, " In this paper, we propose a resource-efficient system for real-time 3D terrain reconstruction and landingspot detection for micro ... Inkyu Sa, Hu He, Van Huynh and Peter Corke, " Tutorials: Part1: Zigzag environment ... Unmanned Aerial Vehicles (UAVs) have been widely used in precision farming and identified as one of the most efficient robots ...
Tutorials: Part2: The wall with opened gap environment environment ... J. Yang, D. Rao, S.-J. Chung, and S. Hutchinson, " ICRA 2018 Spotlight Video Interactive Session Wed AM Pod E.7 Authors: Nishimura, Haruki; Schwager, Mac Title: Active ... Junho Yang, Ashwin Dani, Soon-Jo Chung, and Seth Hutchinson, " Towards monocular vision-based autonomous flight through deep reinforcement learning Qualcomm's Snapdragon Flight platform demonstrates safe
The helicopter behaves a bit shaky, because, the screen recorder decreased the rate of the non-real time controller loop which ...



![[Tello] Monocular vision based autonomous navigation using ORB_SLAM2, Packnet-sfm and Fast-Planner 1](https://i.ytimg.com/vi/TcpziH_DZm0/mqdefault.jpg)

![[Tello] Monocular vision based autonomous navigation using ORB_SLAM2, Packnet-sfm and Fast-Planner 2](https://i.ytimg.com/vi/ciuxBRWLidI/mqdefault.jpg)





