Media Summary: Paper: Citation: Lee, H. Y., Ho, H. W., & Zhou, Y. (2021). The code and our rgbd dataset is now available at In this video, we will be discussing the MiDAS paper, Depth Anything V1, and the latest Depth Anything V2 paper! We are going to ...
Deep Learning Based Monocular Obstacle - Detailed Analysis & Overview
Paper: Citation: Lee, H. Y., Ho, H. W., & Zhou, Y. (2021). The code and our rgbd dataset is now available at In this video, we will be discussing the MiDAS paper, Depth Anything V1, and the latest Depth Anything V2 paper! We are going to ... VUSE Summer Research Project Source code: and ... Unmanned Aerial Vehicles (UAVs) have been widely used in precision farming and identified as one of the most efficient robots ... Supplemental Material for an ICRA 2018 submission.
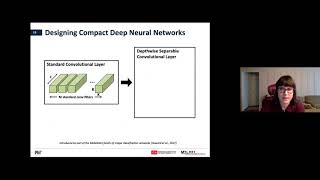
Diana Wofk, a recent Masters in Engineering graduate from the Department of Electrical Engineering & Computer Science (EECS) ... The robot using the algorithm overrides an Deep Learning based Drone Tracking by an Autonomous UAV using a Monocular Camera Demo video of the article accepted to the IEEE IROS 2016 entitled Real-Time Obstacle avoidance for flapping-wing UAV using bio-inspired monocular perception and DRL