Media Summary: This video is related to the following preprint: Geometry-aware This video is related to the following publication: Geometry-aware This video is part of our contribution to IEEE International Conference on Robotics & Automation (ICRA-25) Title:
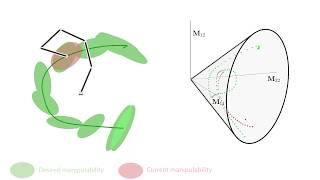
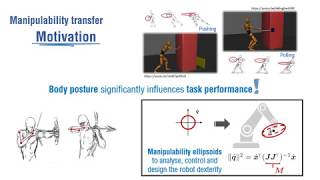
Manipulability Learning Tracking And Transfer - Detailed Analysis & Overview
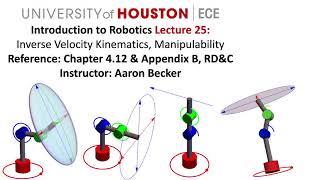
This video is related to the following preprint: Geometry-aware This video is related to the following publication: Geometry-aware This video is part of our contribution to IEEE International Conference on Robotics & Automation (ICRA-25) Title: This video is related to the following paper: Analysis and Lecture 25 finishes our exploration of inverse velocity on a serial robot manipulator. If there are more DOF than 6, the system is ... The Wolfram Demonstrations Project contains thousands ...
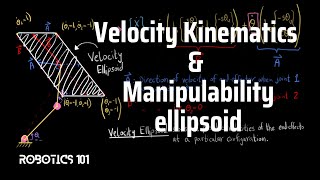
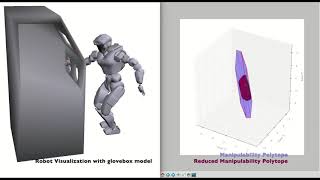
Evaluating Robot Manipulability in Constrained Environments by Velocity Polytope Reduction Relation between joint torques/forces and End-effector forces/torques using the Jacobian matrix is discussed in this video as well ... Project Website: Human demonstrations provide strong priors for robot manipulation, ...