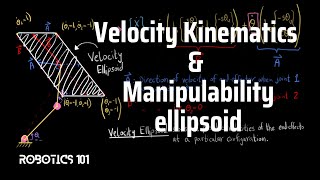
Media Summary: This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... For UR5 6R arm using MATLAB Robotics Toolbox. 机器人学51 manipulability and ellipsoid
Static Force Analysis Manipulability - Detailed Analysis & Overview
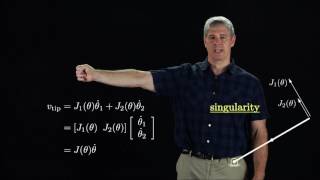
This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... For UR5 6R arm using MATLAB Robotics Toolbox. 机器人学51 manipulability and ellipsoid In this lecture, we will be introducing the concept of robot 机器人学52 manipulability analysis and classic optimization Robotics 1 (prof. Alessandro De Luca, Sapienza Università di Roma) 00:00 Generalized
The Wolfram Demonstrations Project contains thousands ... In this lecture, we will be seeing how the human fingers behave during fine object rotational motion.