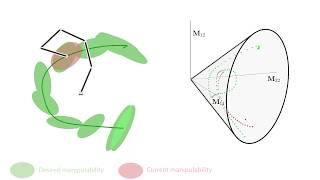
Media Summary: This video is part of our contribution to IEEE International Conference on Robotics & Automation (ICRA-25) Title: (ICRA2025) This paper introduces a novel framework for improving human-to-robot This video is related to the following preprint: Geometry-aware
Manipulability Transfer Tracking Ctrl Bridging - Detailed Analysis & Overview
This video is part of our contribution to IEEE International Conference on Robotics & Automation (ICRA-25) Title: (ICRA2025) This paper introduces a novel framework for improving human-to-robot This video is related to the following preprint: Geometry-aware Lecture 25 finishes our exploration of inverse velocity on a serial robot manipulator. If there are more DOF than 6, the system is ... Project Website: Human demonstrations provide strong priors for robot manipulation, ... Matei Ciocarlie's Robotic Manipulation and Mobility (ROAM) lab works on robotics, looking to discover how artificial mechanisms ...