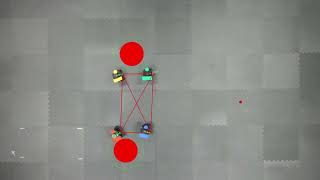
Media Summary: This video is an experiment result of the implementation of consensus algorithm in a group of humanoid robots. The aim of the ... This work is submitted under the title "Communication-Efficient This experiment uses a distributed Nonlinear Model Predictive
Maintain Formation With Obstacle Avoidance - Detailed Analysis & Overview
This video is an experiment result of the implementation of consensus algorithm in a group of humanoid robots. The aim of the ... This work is submitted under the title "Communication-Efficient This experiment uses a distributed Nonlinear Model Predictive formation with obstacle avoidance (編隊避障控制) Yusuf Abdul Razaq: Over the years, control of moving vehicles while Obstacle avoidance in leader-follower formation using artificial potential field algorithm
The drones have a simulated multi ranger sensor( with limited field of view. Simulation of Formation Control of Nonlinear Multi-agent Systems with Obstacle Avoidance Three autonomous robots demonstrate advanced swarm coordination ✨ Features: - Real-time physics simulation -