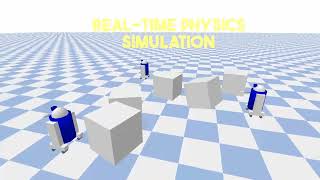
Media Summary: This work is submitted under the title "Communication-Efficient formation with obstacle avoidance (編隊避障控制) Three autonomous robots demonstrate advanced swarm coordination ✨ Features: - Real-time physics simulation -
Formation With Obstacle Avoidance - Detailed Analysis & Overview
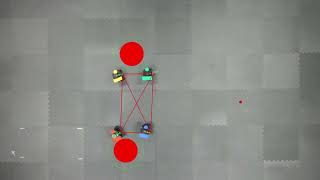
This work is submitted under the title "Communication-Efficient formation with obstacle avoidance (編隊避障控制) Three autonomous robots demonstrate advanced swarm coordination ✨ Features: - Real-time physics simulation - This experiment uses a distributed Nonlinear Model Predictive A Path-Following Controller for a UAV-UGV Obstacle avoidance in leader-follower formation using artificial potential field algorithm
Distributed Formation Obstacle Avoidance for MASs Based on Point-Cloud Fusion and p-Norm Functions A leader UAV (blue) and two wingman UAVs (pink and green) are in a Formation Obstacle Avoidance with ARDrone2.0's