Media Summary: SLAM by ROS navigation and hector_slam package. It uses RPLIDAR so it is very low cost SLAM This tutorial walks through the Navigation Stack on your LoCoBot. Specifically, it discusses the two main ROS packages used in it ... In the standard ROS global/local path planning stack, you create a "costmap" by layering different types of information about ...
Gothere Robot Static Map Display - Detailed Analysis & Overview
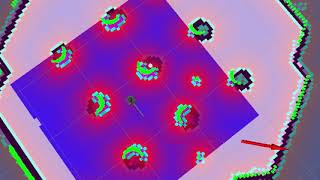
SLAM by ROS navigation and hector_slam package. It uses RPLIDAR so it is very low cost SLAM This tutorial walks through the Navigation Stack on your LoCoBot. Specifically, it discusses the two main ROS packages used in it ... In the standard ROS global/local path planning stack, you create a "costmap" by layering different types of information about ...