Media Summary: SLAM by ROS navigation and hector_slam package. It uses RPLIDAR so it is very low cost SLAM This video shows the capabilities of the terrain This video shows local and global costmaps visualized in ROS and RViz. The costmaps are used by the move_base node as part ...
Gothere Robot Static Map - Detailed Analysis & Overview
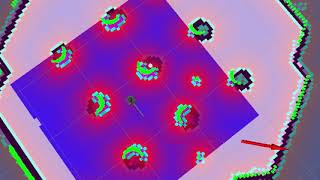
SLAM by ROS navigation and hector_slam package. It uses RPLIDAR so it is very low cost SLAM This video shows the capabilities of the terrain This video shows local and global costmaps visualized in ROS and RViz. The costmaps are used by the move_base node as part ... This tutorial walks through the Navigation Stack on your LoCoBot. Specifically, it discusses the two main ROS packages used in it ... This video shows our terrain classification method as presented at IROS 2014. Terrain classes: asphalt (gray), cobblestones ... We started to expand our visual and semantic SLAM to outdoor world. Thanks to the real time scene understanding your