Media Summary: Accompanying video to the paper: M. R. O. A. Maximo, C. H. C. Ribeiro, and R. J. M. Afonso, “ The video shows a demonstration of our new In this paper we demonstrate an original equivalence between
Footstep Planning With Mixed Integer - Detailed Analysis & Overview
Accompanying video to the paper: M. R. O. A. Maximo, C. H. C. Ribeiro, and R. J. M. Afonso, “ The video shows a demonstration of our new In this paper we demonstrate an original equivalence between One challenge of legged locomotion on uneven terrains is to deal with both the discrete problem ... This video accompanies the paper "Efficient Brian Acosta and Michael Posa. "Perceptive
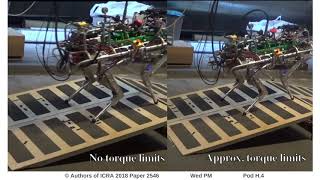
ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.4 Authors: Aceituno-Cabezas, Bernardo; Mastalli, Carlos; Dai, ... Companion video for the Humanoids 2024 paper. Abstract: How many ways are there to climb a staircase in a given number of ... Accompanying video of a Humanoids2020 paper.