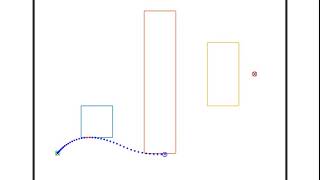
Media Summary: Reference: M. Dabhi, V. R. Desaraju, and N. Michael, “ Avoiding all past locations of the obstacle may be an overly restrictive approach. Here the vehicle quickly becomes separated ... The video shows a simple example of a time minimal
Efficient Mixed Integer Trajectory Planning - Detailed Analysis & Overview
Reference: M. Dabhi, V. R. Desaraju, and N. Michael, “ Avoiding all past locations of the obstacle may be an overly restrictive approach. Here the vehicle quickly becomes separated ... The video shows a simple example of a time minimal The deadlock problem observed in example 1 is avoided in this situation by remembering the objects past positions, and avoiding ... Our next benchmark is that of the dexterous robot grasping problem we model this problem as a The success of a "memoryless" approach to the sinusoidal obstacle depends on parameters such as the frequency and size of the ...
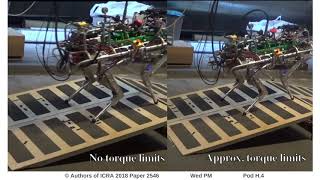
An Effective Framework for Near-Optimal Multi-Robot Path Planning ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.4 Authors: Aceituno-Cabezas, Bernardo; Mastalli, Carlos; Dai, ... Video accompanying the paper presented at ISER 2012 Experimental Multi-Vehicle Code available here: Paper available at: GAZEBO worlds used in ...








![[IROS 2019] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments](https://i.ytimg.com/vi/gwV0YRs5IWs/mqdefault.jpg)

