Media Summary: Bipedal robots promise the ability to traverse rough terrain quickly and efficiently, and indeed, humanoid robots can now use ... All Orthelligent videos: ▻ ☑ Viewed? ☐ Liked? ☐ Subscribed? ▻ Sensor Technology for Intelligent ... ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.6 Authors: Zhang, Wuming; Hauser, Kris Title: Single-Image ...
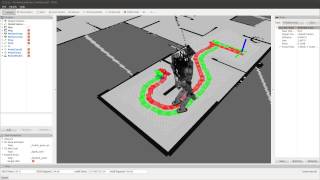
Perceptive Mixed Integer Footstep Control - Detailed Analysis & Overview
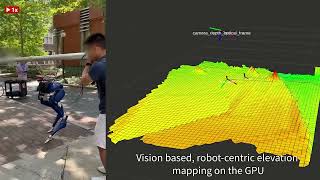
Bipedal robots promise the ability to traverse rough terrain quickly and efficiently, and indeed, humanoid robots can now use ... All Orthelligent videos: ▻ ☑ Viewed? ☐ Liked? ☐ Subscribed? ▻ Sensor Technology for Intelligent ... ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.6 Authors: Zhang, Wuming; Hauser, Kris Title: Single-Image ... Walking perturbation to quantify ankle impedance The donning process is conducted under the guidance and supervision of a Trained Observer, who confirms visually that all PPE ... Weakly collision-free paths for continuous humanoid footstep planning