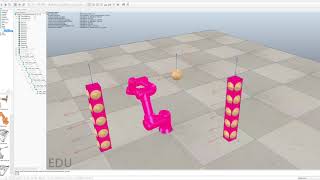
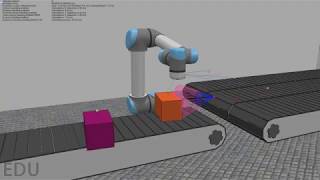
Media Summary: Unable to finish on time...will upload a full forward kinematics package, but as of now: -Initial frames shown -Body joints move to ... This simulation demonstrates an object moved by a robotic arm from arbitrary start location to given goal location. Marc Backas ... A demonstration of inverse kinematics for UR3 robot using Python remote API for V-REP.
Ece470 Final Project Partial Checkpoint - Detailed Analysis & Overview
Unable to finish on time...will upload a full forward kinematics package, but as of now: -Initial frames shown -Body joints move to ... This simulation demonstrates an object moved by a robotic arm from arbitrary start location to given goal location. Marc Backas ... A demonstration of inverse kinematics for UR3 robot using Python remote API for V-REP. A demonstration of path planning inside V-REP for UR3. Before the robot moves, the path planner checks if there is an ... A demonstration of moving joints of the UR3 robots made by Universal Robots using Python remote API. The robot on the right ... Team name: Loner Team Member: Max Asselmeier.
A demonstration of collision detection for UR3. Before the robot moves, the collision checker checks if the collision will occur and ...