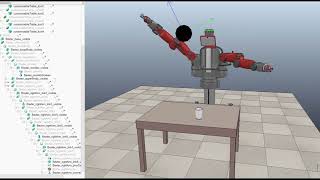
Media Summary: A demonstration of inverse kinematics for UR3 robot using Python remote API for V-REP. This simulation demonstrates an object moved by a robotic arm from arbitrary start location to given goal location. Marc Backas ... Yu Chen (yuc5), Yu Chen (yuc6), XinYu Feng (xinyuf2) The original idea is to have UR3 change a roll of toilet paper in a restroom ...
Final Project Checkpoint 3 Ece470 - Detailed Analysis & Overview
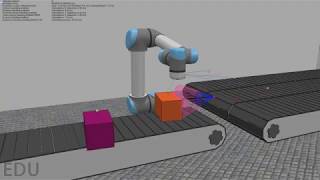
A demonstration of inverse kinematics for UR3 robot using Python remote API for V-REP. This simulation demonstrates an object moved by a robotic arm from arbitrary start location to given goal location. Marc Backas ... Yu Chen (yuc5), Yu Chen (yuc6), XinYu Feng (xinyuf2) The original idea is to have UR3 change a roll of toilet paper in a restroom ... Inverse Kinematics Demonstration: The code now has both FK and IK functions as the robot tries to attain three poses. (x, y, z ... Team name: Loner Team Member: Max Asselmeier. Our VREP simulation illustrates an example of how a UR3 robot, using a suction cup, could sort incoming objects from a conveyor ...
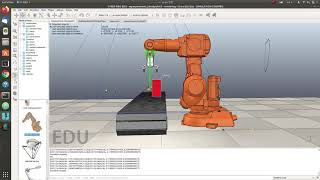
This video shows the full implementation of the "writing UR3."