Media Summary: This is a video demonstration of the Baxter robot running Python code in V-REP. The robot will move in the following order: -each ... A demonstration of inverse kinematics for UR3 robot using Python remote API for V-REP. A demonstration of moving joints of the UR3 robots made by Universal Robots using Python remote API. The robot on the right ...
Final Project Checkpoint 1 Ece470 - Detailed Analysis & Overview
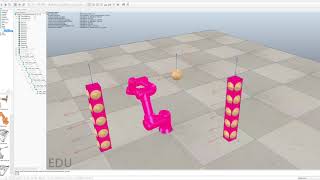
This is a video demonstration of the Baxter robot running Python code in V-REP. The robot will move in the following order: -each ... A demonstration of inverse kinematics for UR3 robot using Python remote API for V-REP. A demonstration of moving joints of the UR3 robots made by Universal Robots using Python remote API. The robot on the right ... A demonstration of path planning inside V-REP for UR3. Before the robot moves, the path planner checks if there is an ... A demonstration of collision detection for UR3. Before the robot moves, the collision checker checks if the collision will occur and ... This is a Robotics Simulation implementing Baxter to work around collision detection. The joint thetas that are used in the ...
Yu Chen (yuc5), Yu Chen (yuc6), XinYu Feng (xinyuf2) The original idea is to have UR3 change a roll of toilet paper in a restroom ...