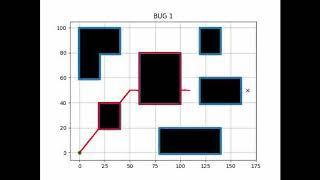
Media Summary: Call the line from the starting point to the goal the m-line 1) head toward goal on the m-line The video represents the implementation of the The video shows the implementation of the
Bug 2 Algorithm Gazebo Ros - Detailed Analysis & Overview
Call the line from the starting point to the goal the m-line 1) head toward goal on the m-line The video represents the implementation of the The video shows the implementation of the “Bug 1” algorithm Gaezbo + ROS Two wheeled mobile robot This video shows a simulated robot I developed in




![[ROS Projects] Bug 2 - Exploring ROS with a 2 wheeled robot #Part 12](https://i.ytimg.com/vi/GYEt8hucRYI/mqdefault.jpg)