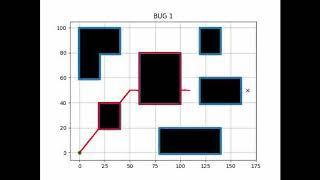
Media Summary: See the other videos in this series: This video ... Call the line from the starting point to the goal the m-line 1) head toward goal on the m-line 2) if an obstacle is in the
Bug2 Path Finding Algorithm Ros - Detailed Analysis & Overview
See the other videos in this series: This video ... Call the line from the starting point to the goal the m-line 1) head toward goal on the m-line 2) if an obstacle is in the