Media Summary: This work is submitted under the title "Communication-Efficient More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. In this video, we deal with the issue of detecting
Two Robot Formations With Collision - Detailed Analysis & Overview
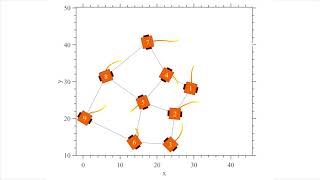
This work is submitted under the title "Communication-Efficient More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. In this video, we deal with the issue of detecting Collision-free Formation Control of Multiple Nano-quadrotors J. Alonso-Mora, A. Breitenmoser, M. Rufli, P. Beardsley, R. Siegwart, Proceedings of the 10th International Symposium on ... This paper proposes combining displacement-based and distance-based approaches to design a strategy for regulation control ...
Collision detection algorithm between two robots We present a distributed control strategy for This experiment illustrates the behavior of The resilience nonlinear model predictive control is used to reach the goal of