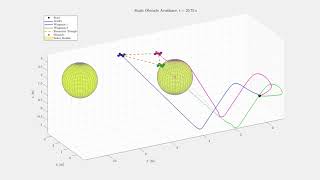
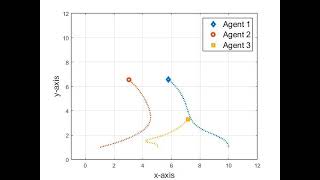
Media Summary: Tom Furey of Sagetech Avionics breaks down ACAS X—the evolution of TCAS designed for the full spectrum of aircraft. A leader UAV (blue) and two wingman UAVs (pink and green) are in a This work presents an integrated approach that combines trajectory optimization and Artificial Potential Field (APF) method for ...
Adaptive Formation With Collision Avoidance - Detailed Analysis & Overview
Tom Furey of Sagetech Avionics breaks down ACAS X—the evolution of TCAS designed for the full spectrum of aircraft. A leader UAV (blue) and two wingman UAVs (pink and green) are in a This work presents an integrated approach that combines trajectory optimization and Artificial Potential Field (APF) method for ... This video show a group of 4 UAVs which autonomously navigate in a cluttered environment Supplemental video for "Three-Dimensional Hydrodynamic Flow-Based The method used is distributed LQ discrete-time game.
The University of Texas at Austin demonstrates how autonomous inspection drones can self-localize, path plan, perform a mission ...