Media Summary: It's time for our robot to make sense of what it can see. In this episode of Embedded Toolbox, Part 4 of our “Let's Build a Robot" ... work done as part of the Robotics module For master in computer vision and robotics " VIBOT " , The two different methods for ... Restaurant Service Robot - Final project for AMR class at the University of Virginia - using
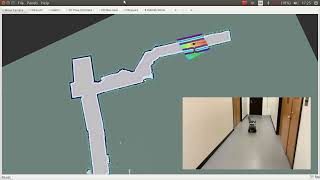
Turtlebot Path Follower Control Localization - Detailed Analysis & Overview
It's time for our robot to make sense of what it can see. In this episode of Embedded Toolbox, Part 4 of our “Let's Build a Robot" ... work done as part of the Robotics module For master in computer vision and robotics " VIBOT " , The two different methods for ... Restaurant Service Robot - Final project for AMR class at the University of Virginia - using