Media Summary: The paper is published in the IEEE International Conference on Robotics and Automation (ICRA), 2023. Pre-print: ... This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Ever wondered how robots achieve such fine, delicate movements? The secret often lies in something called
Torque Control With Joints Position - Detailed Analysis & Overview
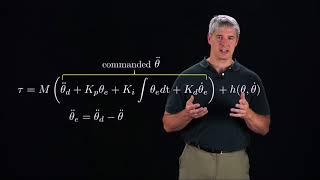
The paper is published in the IEEE International Conference on Robotics and Automation (ICRA), 2023. Pre-print: ... This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Ever wondered how robots achieve such fine, delicate movements? The secret often lies in something called Stability of the computed torque control for a robot with 2 X-joints and 2 tendons Joint torque controller - trajectory tracking PCTC for the control of the EE position and orientation: fixed EE position (6 X-joints, 4 tendons)
PCTC for the control of the EE position and orientation: looped trajectory (6 X-joints, 3 tendons) The 18th International Conference on Ubiquitous Robots (2021) 서울대학교 융합과학기술대학원 박재흥 교수 동적로보틱시스템 ... This paper presents a novel framework for whole-body







![[Lab Meeting] Hybrid Position/Torque Ankle Controller for Minimizing ZMP error of Humanoid Robot](https://i.ytimg.com/vi/OoSKhuWoctc/mqdefault.jpg)

