Media Summary: JUNG, Jaesug; KIM, Donghyeon; PARK, Jaeheung. Operational Space Control Framework for "Multi-Contact Planning and Control for a Ever wondered how robots achieve such fine, delicate movements? The secret often lies in something called
Humanoid Joint Torque Control - Detailed Analysis & Overview
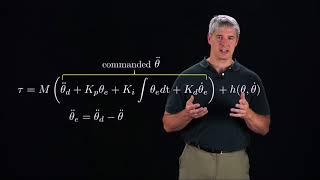
JUNG, Jaesug; KIM, Donghyeon; PARK, Jaeheung. Operational Space Control Framework for "Multi-Contact Planning and Control for a Ever wondered how robots achieve such fine, delicate movements? The secret often lies in something called This paper presents a novel framework for whole-body Join Membership: 🛠️ PCBWay Discount on 3D Printing, ... This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and
Torque-Based Balancing of a Humanoid Robot Performing High-Force Interaction Tasks A summary of the balancing experiments performed on a For an updated version of the video please visit: The video shows a summary of the balancing ... This work presents a passivity-based inverse dynamics (ID)