Media Summary: LeRobot Research Presentation Presented by Cheng Chi in April 2024 This week: Author: Vitalis Vosylius and Edward Johns Institution: The Robot Learning Lab at Imperial College London Published at: ICLR ... This is the first session with Roger leading a discussion about
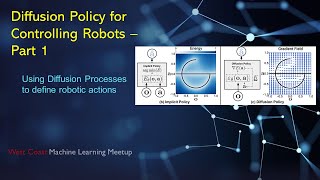
Task Context Aware Diffusion Policy - Detailed Analysis & Overview
LeRobot Research Presentation Presented by Cheng Chi in April 2024 This week: Author: Vitalis Vosylius and Edward Johns Institution: The Robot Learning Lab at Imperial College London Published at: ICLR ... This is the first session with Roger leading a discussion about In this episode of *Robraintics*, we discuss why Princeton University - Nov 3, 2023 Speaker: Russ Tedrake (MIT) Talk title: Dexterous Manipulation with November 30, 2007 lecture by Ted Selker for the Stanford University Human-Computer Interaction Seminar (CS 547). This talk ...
Try out AI assisted coding with Augment Code for 7 days free at ... The video demonstrates the proposed adaptive control framework across multiple robotic platforms and Modeling multimodal human behavior has been a key barrier to increasing the level of interaction between humans and robots, ...