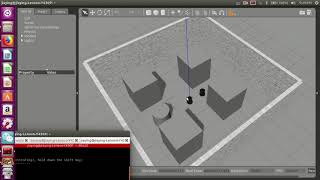
Media Summary: Turtlebot4s maintain a fixed relative position during cycling, deployed by Saimai Lau. Multirobot spawning - GAZEBO + Turtlebot + ROS This experiment uses bearing control based
Simple Turtlebot Multi Robot Formation - Detailed Analysis & Overview
Turtlebot4s maintain a fixed relative position during cycling, deployed by Saimai Lau. Multirobot spawning - GAZEBO + Turtlebot + ROS This experiment uses bearing control based