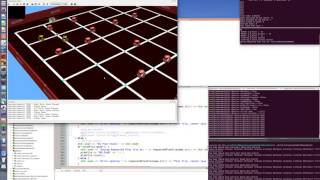
Media Summary: This video was created within Webots, and it doesn't show the other processes involved. But, it's only 1:40 long] In this video, we discuss the nature of the interface between the planner and the In this video, we discuss a subtle problem that occurred in the previous video and demonstrate a solution that resolved it.
Short Version E Puck Navigating - Detailed Analysis & Overview
This video was created within Webots, and it doesn't show the other processes involved. But, it's only 1:40 long] In this video, we discuss the nature of the interface between the planner and the In this video, we discuss a subtle problem that occurred in the previous video and demonstrate a solution that resolved it. Created a communication channel using a PC and multiple This is a project that I did in April 2015 with two friends for a course on AI. For all the 4 tasks, we used a simple 1-layer feedforward ... Self-Organized Aggregation of 40 Physical e-puck Robots
E-puck Mobile Robot - Circuit Navigation using Distance Sensors - Webots This video presents the Task part of our Robotics Project II. The
![[Short Version] e-Puck navigating a grid with unknown obstacles using Idempotent Planning Protocol](https://i.ytimg.com/vi/PE5RA4sIqgY/mqdefault.jpg)