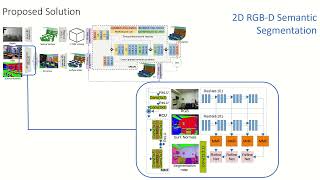
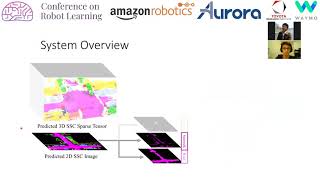
Media Summary: Presented at WACV 2022, details at Source code available from ... S3CNet: A Sparse Semantic Scene Completion Network for LiDAR Point Cloud Tobias Pohlen, Alexander Hermans, Markus Mathias, Bastian Leibe
Semantic Segmentation Assisted Scene Completion - Detailed Analysis & Overview
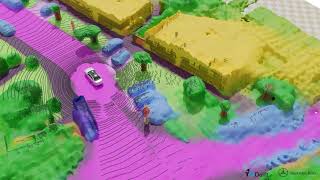
Presented at WACV 2022, details at Source code available from ... S3CNet: A Sparse Semantic Scene Completion Network for LiDAR Point Cloud Tobias Pohlen, Alexander Hermans, Markus Mathias, Bastian Leibe ... comparison of input from LIDAR devices and the outputs from my 3D 3D Course (hands-on 3D AI) → Spatial AI Guide ... It is vital important in AR/MR application which able to learn your surroundings so that it could create seamless interaction ...