Media Summary: Presentation O-3C-04 of European Conference on Computer Vision 2018, Munich Germany Webpage: Title: ... SCPNet: Semantic Scene Completion on Point Cloud (CVPR 2023, Highlight) S3CNet: A Sparse Semantic Scene Completion Network for LiDAR Point Cloud
Efficient Semantic Scene Completion Network - Detailed Analysis & Overview
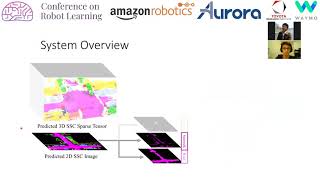
Presentation O-3C-04 of European Conference on Computer Vision 2018, Munich Germany Webpage: Title: ... SCPNet: Semantic Scene Completion on Point Cloud (CVPR 2023, Highlight) S3CNet: A Sparse Semantic Scene Completion Network for LiDAR Point Cloud Authors: Jie Li, Kai Han, Peng Wang, Yu Liu, Xia Yuan Description: As a voxel-wise labeling task, ... comparison of input from LIDAR devices and the outputs from my 3D With the 3D sketch in hand, we further devise a simple yet
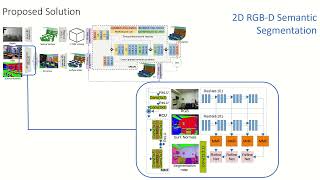
To leverage the coupled nature of these two tasks, we introduce the ICCV 2025 Monocular Semantic Scene Completion via Masked Recurrent Networks