Media Summary: Sensor: VLP-16ch (x3) 2:10 : Miss matching(?) correlation 7:04 : First fatal loop closure 10:43 : Second miss matching(?) Accompanying video for our RSS 2018 publication titled " Multi-Robot demo of Localization and Loop closure of
Segmap Test - Detailed Analysis & Overview
Sensor: VLP-16ch (x3) 2:10 : Miss matching(?) correlation 7:04 : First fatal loop closure 10:43 : Second miss matching(?) Accompanying video for our RSS 2018 publication titled " Multi-Robot demo of Localization and Loop closure of We present SegMatch, a technique for enabling autonomous vehicles to recognize previously visited areas based on the ... This week the Agentic team will touch on: 1. Agent Substrate and what this means for sandboxing 2. AAIF 🎙️ New ... In this video, we delve into the world of Network Segmentation
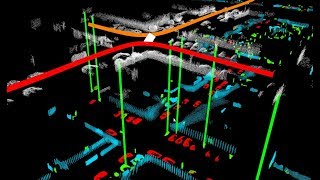
Review of the major Security Assessment and Accompanying video for our RA-L 2018 publication titled "Incremental Segment-Based Localization in 3D Point Clouds": ... Most fine-tuning evaluation pipelines rely on automated metrics that often provide misleading signals. In this technical breakdown, ... Yellow: GPS Blue: Wheel Odometry Green: LiDAR Odometry Red: Optimised Path.