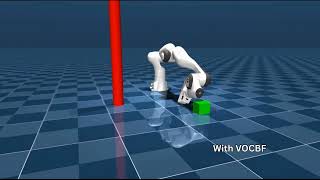
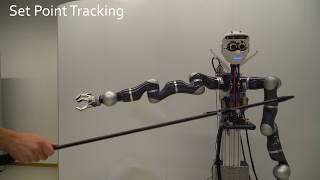
Media Summary: This project demonstrates a learning-based Probabilistic roadmaps (PRMs) are constructed in environments modeled Video illustrating operational space constraint along
Safe Robot Manipulator Control Using - Detailed Analysis & Overview
This project demonstrates a learning-based Probabilistic roadmaps (PRMs) are constructed in environments modeled Video illustrating operational space constraint along This video shows our results on the comparison between Deep Reinforcement Learning (DRL) and Model Predictive Video related to the following work Hamid Sadeghian, Luigi Villani, Mehdi Keshmiri, Bruno Siciliano, “Task space Presentation for the virtual International Conference on