Media Summary: Brock, Oliver, Oussama Khatib, and Sriram Viji. The video presents a constraint-based strategy for Abstract: Enabling robots to perform multi-stage forceful
Safe Task Consistent Manipulation With - Detailed Analysis & Overview
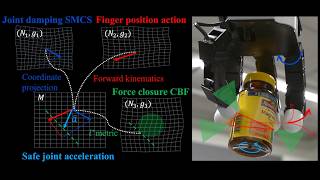
Brock, Oliver, Oussama Khatib, and Sriram Viji. The video presents a constraint-based strategy for Abstract: Enabling robots to perform multi-stage forceful This video accompanies the following paper: Considering Avoidance and Video illustrating operational space constraint along with obstacle avoidance using control barrier functions. ... together to transport habitats and perform more complex
This is the supplementary video for our ICRA 2022 article "Provably You know, Palantir, right? And you know Alex Karp, Palantir's deranged CEO? Have you read his manifesto? Well, I have! Do you ...

![[IROS 2025] Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions](https://i.ytimg.com/vi/TbssD__hpCg/mqdefault.jpg)