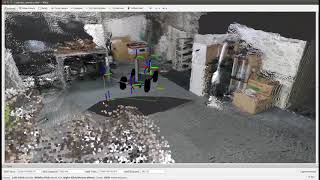
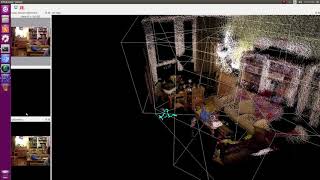
Media Summary: Pointcloud generation with RTAB map and ROS RTABMap generates point cloud with RealSense T265 and D435i RTAB-Map point cloud using ROI ratios option
Rtabmap Generates Point Cloud With - Detailed Analysis & Overview
Pointcloud generation with RTAB map and ROS RTABMap generates point cloud with RealSense T265 and D435i RTAB-Map point cloud using ROI ratios option Point Cloud Generation using RTABMAP & ZED Stereo Camera Parameters: Voxel grid leaf size 0.05 m Max z: 15 m. Handheld Mapping using Kinect and RTabMap in Ubuntu Colored PointCloud
Parameters: Voxel grid leaf size 0.05 m Max z: 4 m. Using RealSense T265 tracking camera for VIO and D415 for video-to-laser mapping. This video shows gmapping using the ...