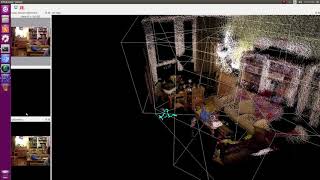
Media Summary: Pointcloud generation with RTAB map and ROS RTAB-Map point cloud using ROI ratios option SLAM using point cloud from D435i (RTAB-Map)
Rtab Map Point Cloud Using - Detailed Analysis & Overview
Pointcloud generation with RTAB map and ROS RTAB-Map point cloud using ROI ratios option SLAM using point cloud from D435i (RTAB-Map) Parameters: Voxel grid leaf size 0.05 m Max z: 15 m. LiDAR SLAM vs Point Cloud Map: Go2 RTAB-Map





![[ROS tutorial] RTAB-Map in ROS 101](https://i.ytimg.com/vi/gJz-MWn7jhE/mqdefault.jpg)