Media Summary: ROS Web İnterface Course Map Zoom and Mapping Full Course: ... VDEngineering ~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning: ... Distributed any-time sampling based motion planning algorithm achieving Nash Equilibriums, referred to as i-Nash Trajectory.
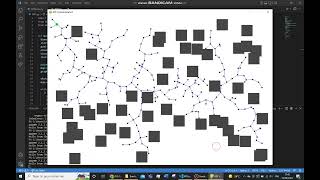
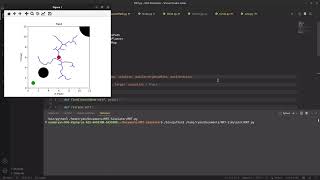
Rrt Biasing Python Implementation Simulation - Detailed Analysis & Overview
ROS Web İnterface Course Map Zoom and Mapping Full Course: ... VDEngineering ~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning: ... Distributed any-time sampling based motion planning algorithm achieving Nash Equilibriums, referred to as i-Nash Trajectory. A first go at making a motion planner with the rapidly exploring random tree ( See the other videos in this series: This video ... A viewer () asked if I could help apply FFT in