Media Summary: This video accompanies the paper entitled " This paper appears in: IEEE Transactions on Control Systems Technology Print ISSN: 1063-6536 Online ISSN: 1558-0865 Digital ... Authors: Aalok Patwardhan, Andrew J. Davison Dyson
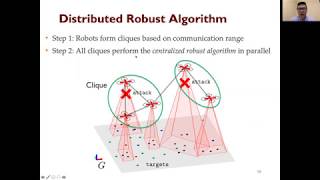
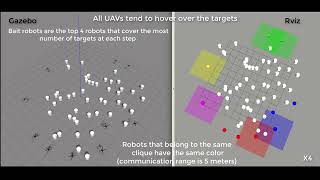
Distributed Multi Robot Motion Planning - Detailed Analysis & Overview
This video accompanies the paper entitled " This paper appears in: IEEE Transactions on Control Systems Technology Print ISSN: 1063-6536 Online ISSN: 1558-0865 Digital ... Authors: Aalok Patwardhan, Andrew J. Davison Dyson Supplemental video for our paper at DARS 2018. Authors: B. Şenbaşlar, W. Hönig, and N. Ayanian. Abstract: Robust trajectory ... A Real Time and Fully Distributed Approach to Trajectory Planning for Multi Robot Systems Distributed Multi-Robot Motion Coordination via MPCC with Online Conflict Resolution