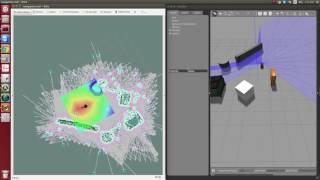
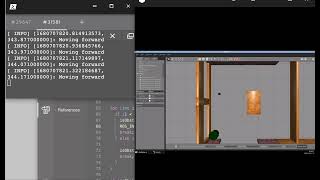
Media Summary: ROS: [Turtlebot 2] Obstacle Avoidance Using Kinect by Nada and Ashwaq This is the final output of my attempt to simulate Virtual Force Field Algorithm in Final Project of the course : Autonomous Robot (2016/2017) Universitat de Girona - Master en enginyeria informàtica Authors ...
Ros Turtlebot 2 Obstacle Avoidance - Detailed Analysis & Overview
ROS: [Turtlebot 2] Obstacle Avoidance Using Kinect by Nada and Ashwaq This is the final output of my attempt to simulate Virtual Force Field Algorithm in Final Project of the course : Autonomous Robot (2016/2017) Universitat de Girona - Master en enginyeria informàtica Authors ...
![Python & ROS _ Obstacle Avoiding Turtlebot Robot [Code In Description]](https://i.ytimg.com/vi/5L95R6ePKqo/mqdefault.jpg)
![ROS 2 | TurtleBot3 Obstacle Avoidance [Tutorial]](https://i.ytimg.com/vi/OmBesHAbSDU/mqdefault.jpg)


![ROS: [Turtlebot 2] Obstacle Avoidance Using Kinect by Nada and Ashwaq](https://i.ytimg.com/vi/BJ6di42R8zU/mqdefault.jpg)