Media Summary: Dr. Andrew Calway University of Bristol, UK W. Zhang S. Wang, and N. Haala Institute for Photogrammetry, University of Stuttgart, Germany Audiovisual Lab, Huawei Munich ... This is the video of experiments on It3f dataset. Refer to: X. Zuo, X. Xie, Y. Liu and G. Huang, "
Robust And Efficient Visual Slam - Detailed Analysis & Overview
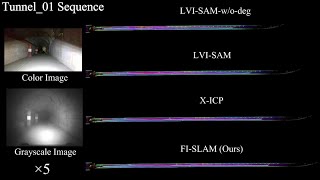
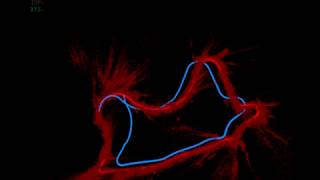
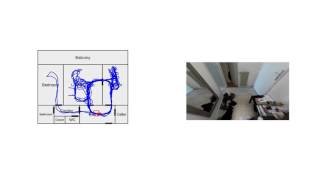
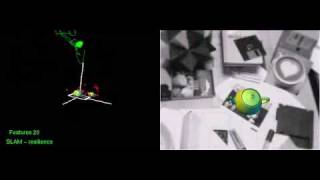
Dr. Andrew Calway University of Bristol, UK W. Zhang S. Wang, and N. Haala Institute for Photogrammetry, University of Stuttgart, Germany Audiovisual Lab, Huawei Munich ... This is the video of experiments on It3f dataset. Refer to: X. Zuo, X. Xie, Y. Liu and G. Huang, " This video shows experimental results in self-built simulation scenarios and real-world environments with our recently proposed ... In ITRO-08, we have proposed a new approach to simultaneously obtain the 3D camera pose and the scene structure from an ... In this episode of Artificial Intelligence: Papers and Concepts, we explore cuVSLAM, NVIDIA's GPU-accelerated solution for
Dominik Van Opdenbosch, Tamay Aykut, Martin Oelsch, Nicolas Alt, Eckehard Steinbach Swarm robotics is receiving increasing ... Demonstrating performance of real-time and