Media Summary: Supplementary video to our ICRA-2018 submission " 0:00 Introduction 0:20 Limitations of traditional SfM and SLAM techniques. 0:57 Shortcomings of existing neural network methods. This is the accompanying video for the following paper: Xieyuanli Chen, Hui Zhang, Huimin Lu, Junhao Xiao, Qihang Qiu and Yi ...
Robust Large Scale Monocular Visual - Detailed Analysis & Overview
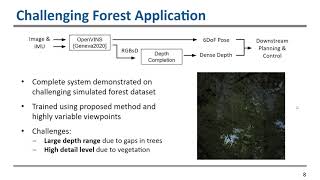
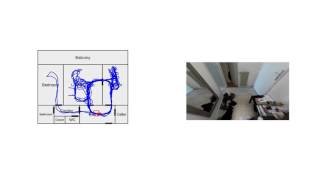
Supplementary video to our ICRA-2018 submission " 0:00 Introduction 0:20 Limitations of traditional SfM and SLAM techniques. 0:57 Shortcomings of existing neural network methods. This is the accompanying video for the following paper: Xieyuanli Chen, Hui Zhang, Huimin Lu, Junhao Xiao, Qihang Qiu and Yi ... Accepted to ICRA 2021. In this work we augment our prior state-of-the-art VIO system, OpenVINS, with the capability to produce ... GSLAM: GSLAM: Initialization-robust Monocular Visual SLAM via Global Structure-from-Motion More demonstrations can be seen in followings: * Project website: * Three kinds of feature detection and ...
In proceedings of CVPR 2014: IEEE Conference on Computer by Hyoseok mast3r-slam results ICRA 2026, Have We Mastered Accepted to ICRA2021. Abstract: In this work we augment our prior state-of-the-art




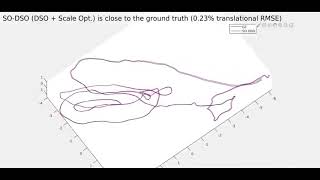





![[ICRA 2026] Have We Mastered Scale in Deep Monocular Visual SLAM? - Case study](https://i.ytimg.com/vi/4hJfwpZN7wo/mqdefault.jpg)