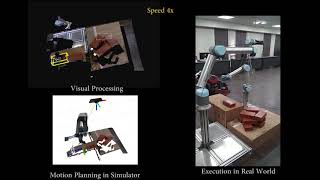
Media Summary: Neural network trained only on synthetic data for skeletal D-SPDH: Improving 3D Robot Pose Estimation in Sim2Real scenario via Depth Data Lu, J., Liang, Z., Xie, T., Ritcher, F., Lin, S., Liu, S., & Yip, M. C. (2024). CtRNet-X: Camera-to-
Robot Pose Estimation From Depth - Detailed Analysis & Overview
Neural network trained only on synthetic data for skeletal D-SPDH: Improving 3D Robot Pose Estimation in Sim2Real scenario via Depth Data Lu, J., Liang, Z., Xie, T., Ritcher, F., Lin, S., Liu, S., & Yip, M. C. (2024). CtRNet-X: Camera-to- 6D Pose Estimation for Robotic Pick and Place Jonathan Tremblay, Stephen Tyree, Terry Mosier, Stan Birchfield. Indirect Object-to- Artificial Intelligence terms explained in a minute for everyone! This week's term is 2D / 3D Human
Long version for IROS 2020 paper Jonathan Tremblay, Stephen Tyree, Terry Mosier, Stan Birchfield. Indirect Object-to- Introductory video of the paper "Real-time Holistic Demonstration video accompanying our paper "3D








![[ECCV 2024] Real-time Holistic Robot Pose Estimation with Unknown States](https://i.ytimg.com/vi/9NsLJvp1IPE/mqdefault.jpg)

