Media Summary: D-SPDH: Improving 3D Robot Pose Estimation in Sim2Real scenario via Depth Data Demonstration video accompanying our paper " This is a short clip to demonstrate the speed of the predictions of SingleShotPoseEstimation and Betapose. The estimations were ...
3d Robot Pose Estimation From - Detailed Analysis & Overview
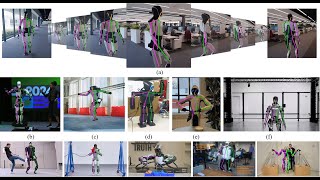
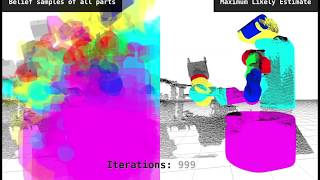
D-SPDH: Improving 3D Robot Pose Estimation in Sim2Real scenario via Depth Data Demonstration video accompanying our paper " This is a short clip to demonstrate the speed of the predictions of SingleShotPoseEstimation and Betapose. The estimations were ... Simon Bultmann, Raphael Memmesheimer, and Sven Behnke: External Camera-based Mobile This is a short clip to demonstrate the accuracy of the predictions of SingleShotPoseEstimation and Betapose when trained on a ... For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for ...




![[ICRA 2023] External Camera-based Mobile Robot Pose Estimation for Collaborative Perception ...](https://i.ytimg.com/vi/e2LpcZDWaZc/mqdefault.jpg)