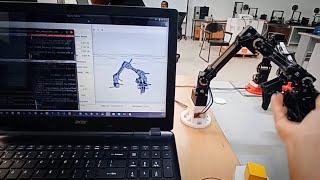
Media Summary: In this research, we propose a user-guided motion planning algorithm in combination with reinforcement Automatic Control and Robotics Master. UPC BarcelonaTech We propose a stochastic graph-based framework for a
Robot Learning From Demonstration Using - Detailed Analysis & Overview
In this research, we propose a user-guided motion planning algorithm in combination with reinforcement Automatic Control and Robotics Master. UPC BarcelonaTech We propose a stochastic graph-based framework for a A brief video covering some of the work currently being done in the brown robotics lab on Humans are known to manage postural movements in a very elegant manner. In the task of standing up from a chair, a humanoid ... Everything that moves will be autonomous and will embody robots of every kind. Explore the continuous loop of ...
Due to the natural variation in the scene it is difficult to program a fixed motion trajectory for a ... algorithm with some basic understanding of deep reinforcement Full video explanation of the paper "Human and



![Learning from demonstration using DMPs [Robot Learning]](https://i.ytimg.com/vi/U5Dt89HLMPA/mqdefault.jpg)