Media Summary: This work presents the development of an intelligent nonlinear sliding mode control strategy to control the motion of a UDE-based Trajectory Tracking Control for a Quadrotor Slung-Load System: constant wind disturbance The ability to transport payloads transform
Quadrotor Uav Robust Trajectory Tracking - Detailed Analysis & Overview
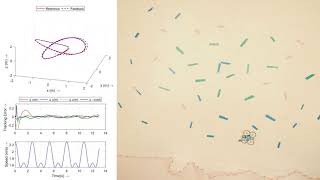
This work presents the development of an intelligent nonlinear sliding mode control strategy to control the motion of a UDE-based Trajectory Tracking Control for a Quadrotor Slung-Load System: constant wind disturbance The ability to transport payloads transform Robust Trajectory Tracking by a Quadcopter: A Game Against Nature For more details see Manjunath, Abhishek, et al. "Application of virtual target based guidance laws to path In this work, we describe the hardware and software of a