Media Summary: For more details see Manjunath, Abhishek, et al. "Application of virtual target based guidance laws to Indoor Circular Trajectory Tracking with Quadrotor Aggressive Circular Trajectory Tracking with Quadrotor
Quadrotor Tracking A Circular Trajectory - Detailed Analysis & Overview
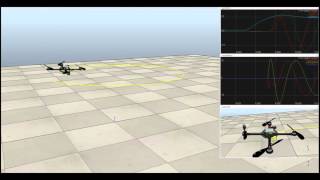
For more details see Manjunath, Abhishek, et al. "Application of virtual target based guidance laws to Indoor Circular Trajectory Tracking with Quadrotor Aggressive Circular Trajectory Tracking with Quadrotor Two tasks are demonstrated in this video: 1. Attitude Trajectory Following of a Quadrotor: Circle This is the video of a Quanser Qball doing a vertical