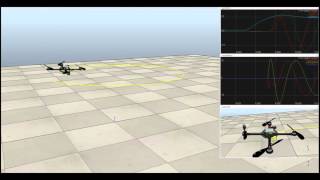
Media Summary: Circular Trajectory Tracking and Admittance Control Performance of a 3 DOF Hybrid Robot The video of the circular trajectory tracking This video demonstrates the capabilities of our inverse kinematics (IK) solver by simulating a UR5 robot manipulator
Circular Trajectory Tracking - Detailed Analysis & Overview
Circular Trajectory Tracking and Admittance Control Performance of a 3 DOF Hybrid Robot The video of the circular trajectory tracking This video demonstrates the capabilities of our inverse kinematics (IK) solver by simulating a UR5 robot manipulator After 10 trials, the robotic spacecraft has autonomously learned to accurately This is the supplementary material for the manuscript "Sampled-data adaptive control of a SCARA robot with identifier/controller ... Integration of a non-linear adaptive controller for
Simulation videos that form the basis for the Inverse kinematic model based on a combination of adaptive grid search and a new closed-form solution: