Media Summary: Underactuated Robots S22 Final Project by Christian Viteri and Portia Gaitskell. The ability to transport payloads transform Unmanned Aerial Vehicles (UAVs) from primarily monitoring and surveillance ... Quadrotor 3D Path Planning, Trajectory Generation and Control
Quadrotor Rrt Path Follower Simulation - Detailed Analysis & Overview
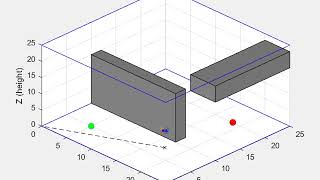
Underactuated Robots S22 Final Project by Christian Viteri and Portia Gaitskell. The ability to transport payloads transform Unmanned Aerial Vehicles (UAVs) from primarily monitoring and surveillance ... Quadrotor 3D Path Planning, Trajectory Generation and Control We use polynomial splines to plan trajectories between waypoints in a known environment. The waypoints are found using the ... Multiple Task BiRRT Path Planning for Quadrotor in V-REP In many mobile robotics scenarios, such as drone racing, the goal is to generate a trajectory that passes through multiple ...