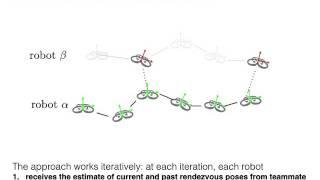
Media Summary: In many mobile robotics scenarios, such as drone racing, the goal is to generate a trajectory that passes through multiple ... Joao Moura, Theodoros Stouraitis and Sethu Vijayakumar, Non-prehensile Planar Manipulation via Trajectory Optimization with ... We propose a distributed algorithm to estimate the 3D trajectories of multiple cooperative robots from relative pose measurements ...
Cpc Complementary Progress Constraints For - Detailed Analysis & Overview
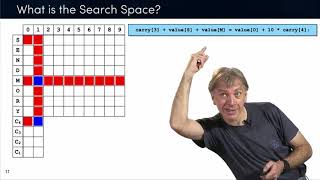
In many mobile robotics scenarios, such as drone racing, the goal is to generate a trajectory that passes through multiple ... Joao Moura, Theodoros Stouraitis and Sethu Vijayakumar, Non-prehensile Planar Manipulation via Trajectory Optimization with ... We propose a distributed algorithm to estimate the 3D trajectories of multiple cooperative robots from relative pose measurements ... ICRA 2018 Spotlight Video Interactive Session Tue AM Pod G.4 Authors: Robinson, D. Reed; Mar, Robert T.; Estabridis, Katia; ... Real-time Efficient Trajectory Planning for Quadrotor Based on Hard Constraints Irit Dinur (Weizmann Institute) 50 Years of Satisfiability: The Centrality of SAT in the ...
Optimization of Path Selection for Multi-Dimensional Motion