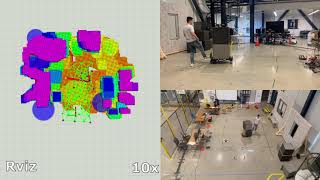
Media Summary: This video introduces the popular sampling-based I quickly show off my solution and understanding of PRM is a sampling-based robot motion-planning technique developed in the 1990s that is still in use today. We start with PRM on ...
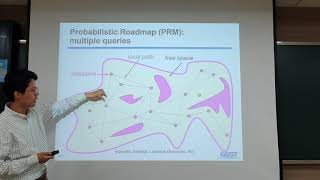
Probabilistic Road Map - Detailed Analysis & Overview
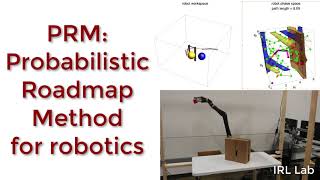
This video introduces the popular sampling-based I quickly show off my solution and understanding of PRM is a sampling-based robot motion-planning technique developed in the 1990s that is still in use today. We start with PRM on ... This is the extra credit vedio for ECE 470 course, this vedio is edited and recorded by Yuqing Zhang. The topic is the PRM method ... PRM with flocking follow the leader boids, sample behaviour - exploration. Video of the presentation at IROS 2022 of the paper "T-PRM: Temporal
Basic terminologies of path planning (or motion planning), including way points, completeness, performance and optimality, ... Overview of RRT, RRT*, PRM Includes visuals created from our own implementations Final Project for MIT 6.881 By Violet Killy, ... See the other videos in this series: This video ... MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ...






![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)