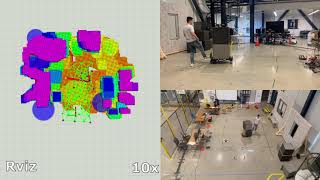
Media Summary: This video introduces the popular sampling- Motion Planning with Collision Prediction MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ...
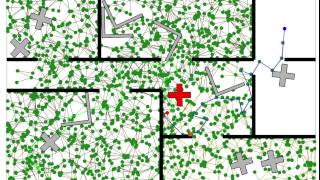
Heuristic Based Incremental Probabilistic Roadmap - Detailed Analysis & Overview
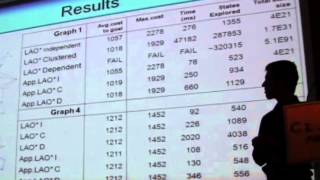
This video introduces the popular sampling- Motion Planning with Collision Prediction MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ... A conference talk from ICAPS 2009, given by Michael Kneebone. Abstract. This paper proposes NN-D* Lite, a learning-enhanced We use a 5 DoF hierarchical abstraction in order to control the swarm, which is easily coupled with a
This short video discusses basic ideas behind