Media Summary: Video companion (1/2) of the paper: "Design, Control, and Experiments of a Low-Cost Open-Source Video companion (2/2) of the paper: "Design, Control, and Experiments of a Low-Cost Open-Source SEGESTA Universität Duisburg-Essen Lehrstuhl für Mechatronik.
Planar Cable Driven Parallel Robot - Detailed Analysis & Overview
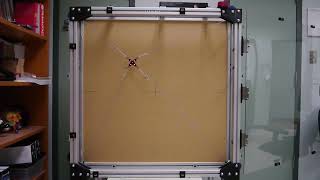
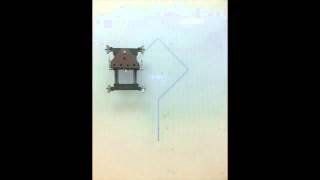
Video companion (1/2) of the paper: "Design, Control, and Experiments of a Low-Cost Open-Source Video companion (2/2) of the paper: "Design, Control, and Experiments of a Low-Cost Open-Source SEGESTA Universität Duisburg-Essen Lehrstuhl für Mechatronik. Degree of Freedoms: 2 - Speed: 400 mm/s - Accuracy: +/- 1 mm - Workspace: 2m x 2m - Payload capability: 150 kg. Demo for tilting an object or tool by 90° (2x 45°). We build industrial This video serves as Multimedia extension for the following Article: Rushton, M., and Khajepour, A. (December 23, 2020).
Authors: Vishal Ramadoss, Darwin Lau, Dimiter Zlatanov, Matteo Zoppi Video for ASME IDETC-CIE, Virtual Conference, August ... A Cable-Driven Parallel Robot with Aerial and Ground Mobile Bases Workspace: 2m x 2m. - Precision: +/- 1mm. - Speed: 200 mm/s. - Payload capability: 100 kg.