Media Summary: SEGESTA Universität Duisburg-Essen Lehrstuhl für Mechatronik. Proud of being one of the first humans to have the opportunity trying RopeBot is back... for almost two years there were no new videos on YouTube. But a lot has happened in that time. The student ...
A Cable Driven Parallel Robot - Detailed Analysis & Overview
SEGESTA Universität Duisburg-Essen Lehrstuhl für Mechatronik. Proud of being one of the first humans to have the opportunity trying RopeBot is back... for almost two years there were no new videos on YouTube. But a lot has happened in that time. The student ... Demo for tilting an object or tool by 90° (2x 45°). We build industrial Video companion (1/2) of the paper: "Design, Control, and Experiments of a Low-Cost Open-Source Planar This video showes the preliminary test results of the TBot
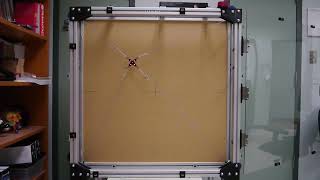
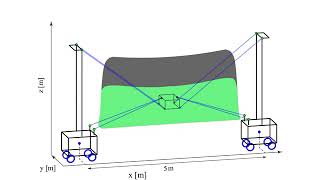
Cheng, H. H., & Hughes, J. (2025). 8-DoFs This is a supplemental video to ICRA 2023 submission 613: "A Hybrid In this work we have analyzed the Wrench Feasible Workspace of FASTKIT which is a Mobile See also: Yusuke Sugahara, Guangcan Chen, Nanato Atsumi, Daisuke Matsuura, Yukio Takeda, Ryo Mizutani and Ryuta ... This is the second prototype of the project RopeBot. The main control loop is implemented in C++ and runs on a Raspberry Pi 3B.