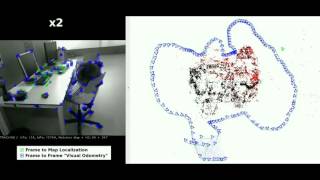
Media Summary: E-mail : rodrigosarmentoxx.com GitHub: This project Paper ... speed x2 E-mail : rodrigosarmentoxx.com GitHub: This project ... Stereo sequence from a Micro Aerial Vehicle (MAV). No IMU data used. Code & Info:
Orb Slam2 Fixed Wing Dataset - Detailed Analysis & Overview
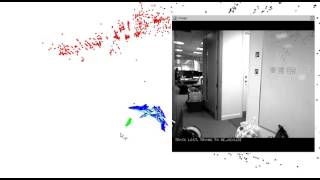
E-mail : rodrigosarmentoxx.com GitHub: This project Paper ... speed x2 E-mail : rodrigosarmentoxx.com GitHub: This project ... Stereo sequence from a Micro Aerial Vehicle (MAV). No IMU data used. Code & Info: Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ... The map was created using RGBD (+depth), yet relocalization works reasonably well with only RGB. See the map created in the ...